


Comment prototyper un robot de ponction veineuse en trois semaines

Pour développer son robot médical VenousPro, la société VascuLogic a fait appel à la plate-forme de conception de National Instruments. Ce qui lui a permis de réaliser un prototype en trois semaines au lieu des trois mois initialement prévus. Avec une économie de 50000 dollars en bonus.
Plus d'1,4 milliard de ponctions veineuses sont effectuées chaque année aux États-Unis, ce qui en fait l'intervention clinique invasive la plus répandue outre-atlantique. Son taux de réussite varie énormément d'un hôpital à un autre, notamment lorsque des conditions difficiles – liées à la physiologie du patient ou à l'expérience du praticien – compromettent la réussite de la ponction à la première tentative.
Cette problématique a inspiré le développement de dispositifs d'imagerie standard conçus pour améliorer la visibilité des veines, mais ils ne dispensent pas le praticien de procéder lui-même à l'insertion de l'aiguille.
98% de réussite au premier essai
C'est pour combler cette lacune que la start-up américaine Vasculogic a développé son système VenousPro, qui permet de procéder à des ponctions veineuses de manière autonome, de sorte que le praticien n'a aucun contact avec l'aiguille. Le résultat, après de nombreux essais in vitro, est un taux de réussite de positionnement et d'introduction de l'aiguille de 98 % dès le premier essai, et ce en moins de deux minutes.
VenousPro s'appuie sur la création d'images et le mappage temps réel de coordonnées spatiales 3D à partir des veines périphériques de l'avant-bras pour procéder au guidage robotisé d'une aiguille dans une veine sélectionnée.
Le développement d'un prototype avancé, pouvant être utilisé dans le cadre d'un premier essai sur l'homme, dépendait de la résolution de trois contraintes principales :
- Le dispositif devait être sûr. Il fallait donc garantir la répétabilité et le déterminisme de son exécution.
- Il devait être facilement transportable, afin de pouvoir être utilisé dans toutes sortes d'environnements cliniques.
- Il devait répondre aux critères rigoureux imposés par la FDA.
VascuLogic a étudié différents environnements de programmation et plusieurs interfaces matérielles avant de sélectionner les technologies de National Instruments (NI).
Un programme de subvention pour aider les développeurs de DM
Rappelons que National Instruments (NI) propose des solutions matériel/logiciel pour les applications de mesure, de test et de contrôle embarqué. La société américaine a mis en place un programme de subvention pour les applications médicales, qui permet aux candidats retenus de bénéficier gratuitement d'outils (matériel/logiciel) et d'une formation, pour développer leurs projets innovants. VascuLogic a ainsi pu exploiter la plate-forme de conception de NI, basée sur l'environnement de programmation graphique LabVIEW et du matériel modulaire CompactRIO pour développer son prototype avancé.
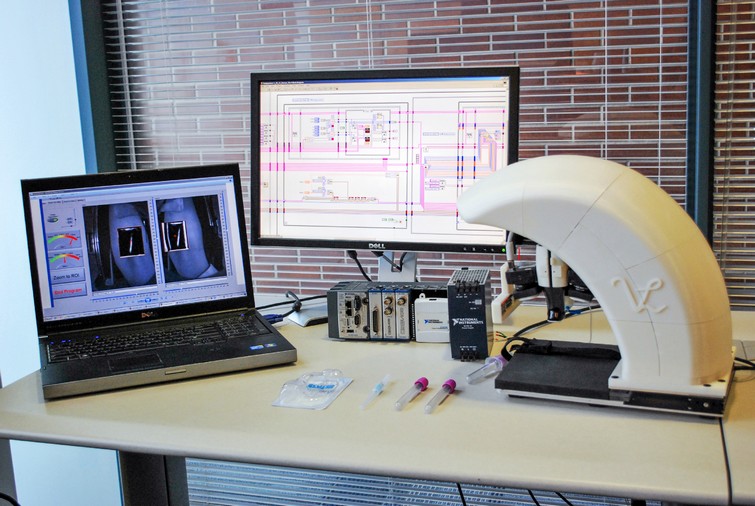
Figure 1 - Le prototype avancé a été développé à l'aide de la plate-forme de contrôle embarqué NI CompactRIO.
Le cœur du dispositif (Figure 1) est un contrôleur CompactRIO (cRIO-9025) associé à cinq modules d'entrées/sorties analogiques et numériques. Ces entrées/sorties assurent le guidage d'un bras robotique miniature à quatre degrés de liberté, et la communication bidirectionnelle sur 8 canaux numériques.

Figure 2 - Le système de vision fait appel à deux caméras GigE Vision à sensibilité améliorée dans le proche infrarouge.
Le contrôleur gère également (via ses ports RS232, Ehternet et USB) trois platines de positionnement linéaire pour un déplacement sur trois axes orthogonaux, deux caméras GigE Vision à sensibilité améliorée dans le proche infrarouge, ainsi qu'une sonde échographique portable (Figure 2).
Le "cerveau" du système VenousPro a été construit à partir de la bibliothèque d'outils mathématiques, de robotique et de vision disponible sous LabVIEW. "Nous avons utilisé une architecture de machine à états avec file d'attente pour contrôler de manière déterministe les capteurs/actuateurs du contrôleur CompactRIO et l'interface utilisateur (Figure 3) de la machine hôte", précise Alvin Chen, responsable de l'ingénierie chez Vasculogic.
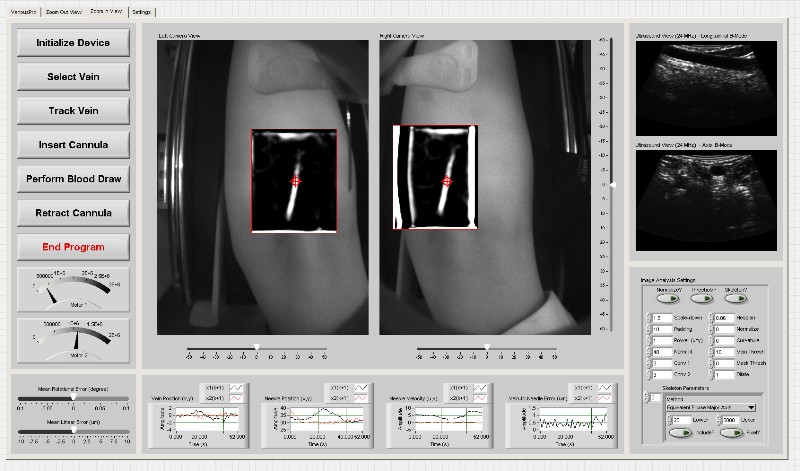
Figure 3 - Interface utilisateur sous LabVIEW.
Exploiter les bibliothèques de LabVIEW dédiées à la vision et à la robotique
Pendant l'exécution temps réel, les caméras GigE Vision et la sonde échographique acquièrent des images. Le processus de traitement exploite des algorithmes avancés issus du module NI Vision Development. Les informations relatives à la vitesse et à la position 3D extraites à partir des images acquises sont communiquées aux modules de commande d'axes du contrôleur CompactRIO à 20 images par seconde. Le système guide ensuite le manipulateur d'aiguille robotisé.
Le guidage fait appel à des programmes (appelés VIs pour Virtual Instruments) existants, disponibles dans les bibliothèques spécialisées de LabVIEW. Il s'agit de VIs de cinématique, de contrôle PID et de planification de parcours, notamment pour les fonctions de corrélation des angles d'articulation du bras robotique avec les coordonnées cartésiennes 3D de la pointe de l'aiguille. Le programme de guidage utilise également le module NI LabVIEW Control Design and Simulation pour prévoir, à l'aide d'un filtre de Kalman, les positions suivantes en fonction des profils de vitesse courants.
Un gain de temps et d'argent à la clé
"Alors que nous avions initialement estimé la durée de ce projet à trois mois, la souplesse et la modularité de l'environnement LabVIEW nous ont permis de l'achever en trois semaines seulement.", précise Alvin Chen. "Ainsi, nous avons pu établir la preuve de concept préclinique par test in vitro plus tôt que prévu. Et nous avons économisé 50000 dollars par rapport au budget initialement prévu."
VascuLogic a l'intention d'améliorer son système avec un matériel CompactRIO multicœur et de développer son interface utilisateur sur un écran tactile NI afin de pouvoir se passer du PC hôte. Une fois que ces changements auront été mis en œuvre, et avec l'approbation du comité d'examen institutionnel, la société pourra débuter des essais cliniques chez l'homme en vue de soumettre son dossier à la FDA.
Pour un avant-goût du VenousPro en action in vivo, visionner cette vidéo.
VascuLogic, USA-NJ-08854 Piscataway, vasculogic.com
National Instruments, F-92735 Nanterre, www.ni.com/medical/f




 X (ex Twitter)
X (ex Twitter) LinkedIn
LinkedIn



